手机版
手机版
中新网1月14日电 针对月球背面地形复杂,对嫦娥四号着陆器和巡视器带来哪些挑战以及如何解决的问题,嫦娥四号探测器系统总设计师孙泽洲表示,着陆器通过自身导航、制导精度的提高可实现在相对安全的着陆区软着陆,目前来看实现了预期的着陆精度。此外,巡视器对于跃障和爬坡有较强的适应能力,就目前掌握的着陆区地形看,还没有不能逾越的障碍。
14日,国新办就探月工程嫦娥四号任务有关情况举行发布会。会上,有记者提问,这次嫦娥四号任务,月球背面的地形十分崎岖和复杂,对着陆器和巡视器都带来了哪些困难和挑战,怎么去解决的?
中新社发 中国国家航天局供图
孙泽州表示,在月球背面软着陆,实现地月的通信中继是个必要的条件,但同时月球背面的复杂地形对于着陆和巡视同时也是巨大的挑战。我们要在月球背面实现软着陆,由于月球背面十分崎岖,要实现安全软着陆,主要是两个手段,第一是高精度软着陆,我们只有提高着陆精度,才可能在一个比较崎岖的地区里找到一个相对安全的着陆区作为着陆点的选择。实现高精度的软着陆,也是两个方面,首先我们通过精细化的轨道设计和轨道调整策略,以及地面精确的测定轨,确保我们动力下降初始点的位置精度是满足要求的,这就确定了初始点的精度。
再一个,下降的过程中,通过自身导航精度以及制导精度的提高,从而实现450公里航程上的精确控制,通过这两个手段来实现这样的精确着陆。从目前嫦娥四号的着陆效果来看,应该说是非常好的,是实现了预期的着陆精度。
孙泽州还表示,地形复杂要实现高可靠的软着陆,一方面,因为地形十分崎岖,在450公里航迹上地形起伏是剧烈的,最高速达到7公里,在动力下降策略上,做了跟嫦娥三号不一样的改变,来回避地形起伏对于我们着陆安全的影响。
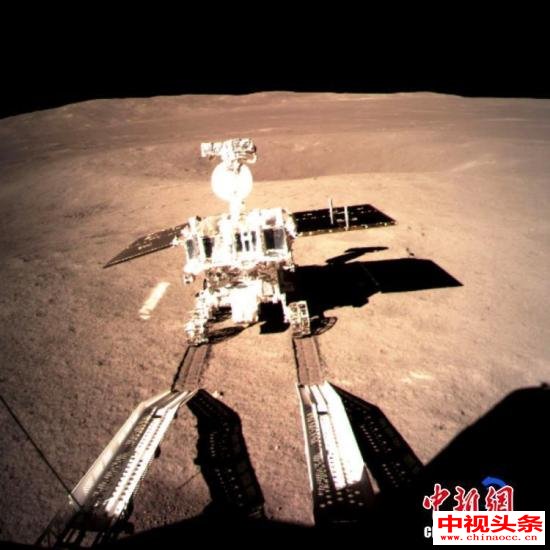
另一方面,在着陆过程中自主进行避障,我们通过接力避障的方式,有效地避免着陆器遇到的障碍,在着陆区里选择最为安全的点作为着陆点。从着陆过程的遥测信息,以及降落相机拍摄的图像可以看出,动力下降的过程中实现了有效避障,也实现了定点定时的准确着陆。
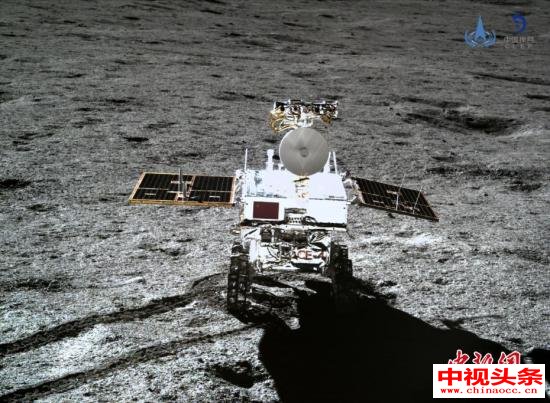
孙泽州最后补充,对于巡视器着陆后,对着陆区周围地形地貌的成像,大家可能看到了,地形的起伏也是剧烈的,布满了大小的撞击坑。对于巡视器来讲,在这样复杂的地形上进行巡视,也有很大的难度。我们现在主要是从两个方面来面对这个问题,第一,精细化的规划,通过对巡视器感知的图像进行精确的地面恢复,制定更为合理的行走路线,力争找到一些相对安全的区域作为行走的路线。
第二,充分发挥巡视器的能力,巡视器在行走中是能够自主进行避障的,前面有障碍,会停下来,自主进行新的路径规划。另外,巡视器对于跃障和爬坡应该有比较强的适应能力,通过巡视器能力的充分发挥,在目前掌握的着陆区周围的地形来讲,应该说还没有我们不能逾越的障碍。

感谢您的支持,我会继续努力的!


打开支付宝扫一扫,即可进行扫码打赏哦